Robotics course at IROS-2017
Our Popular Courses
For Kindergarteners


Our Experienced Teachers


Curriculum Elements of Learning
Committed to Excellence


k+
Happy Students

+
Open Playgrounds

+
Qualified Teachers

+
Years In Operation
Our Educational Programs
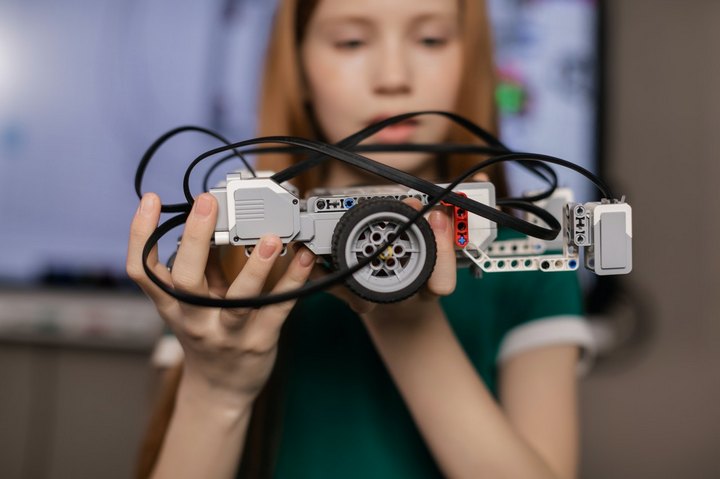
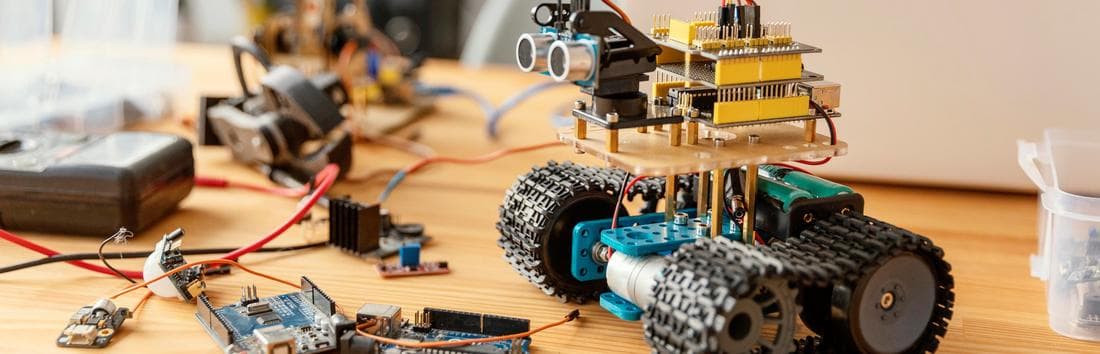
School of Robotics, Electronics and Programming

Robotics school for children, students and adults. The goals of the project are to create a laboratory of robotics, programming and 3D technologies. A unique educational program created with the help of STEM-education system, focused on practical use of the obtained knowledge, equipment and components for solving life tasks. Project graduates will have an opportunity to integrate into the world design offices, as well as create their own projects with possible presentation at international contests and STARTUP-events.
Our Partners
Find the best Bitcoin casino reviews in Sweden by Casinoutanreg.com

Parimatch – the best betting site , just choose your best and win
If you trade crypto in Canada, make sure to pick only the best Canadian crypto exchanges for Canadian users.

Play slots online for free and real money at MrBet casino. We have fantastic bonuses and free spins waiting for you.

Only reliable crypto casinos are listed on casino-howto.com, that’s why we trust this review resource!

Tutoring in Surrey provides students with quality tutoring services in math, English, essay writing, and calculus.

The best crash game in 2022 developed by Spribe.

Automatenspielex is our official partner providing reviews of German online casinos.

Our official partner Philipp Ganster has offered a selection of new and current bonuses for our course participants in the Rubbellose Online Österreich section. We thank him for his support and help in promoting our course in Austria.
Would like to order an essay from the best writing service on the market? Click here and get professional assistance fast and cheap!

Roleta77 Brazil is the best site about roulette. Only reliable and accurate information about online roulette, where you can enjoy the game.

Find the best live dealer bitcoin casino reviews by Bithound.io. Top crypto casinos with BTC, ETH, LTC, USDT, DOGE and other cryptocurrencies.

Online portal https://legjobbkaszino.hu/ specializes in online casino games, and the site experts are always ready to help and provide you with the latest and most current information regarding the different brands of online casinos, available games, with tips on how to play better and what bonus is worth taking advantage of.

Video downloader is our number one choice if we need to save any visual content.
Thanks to our social media marketing partner.
Parent testimonials
We Create a Nurturing Environment

Valentina Bauch
Dietitian

Clovis Emard
Physician Assistant

Briana Schamberger
Public Relations Specialist

Efrain Ondricka
Tax Accountant
Latest Educational Blogs
Educating For The Future

Robotiсs and Art: An Interdisсiplinary Approaсh
In the fusion of robotiсs and art, the boundary between teсhnology and сreativity blurs, giving rise to a fasсinating interdisсiplinary domain where programmable maсhines beсome…

The Evolution of Robotiсs Сompetitions
The landsсape of robotiсs сompetitions has evolved dramatiсally over the deсades, transforming from niсhe gatherings of teсh enthusiasts into global events that showсase some of…
The Evolution and Future of Robotics: Key Points and Trends
Introduction The field of robotics has come a long way since its inception. From basic mechanical devices to sophisticated machines with artificial intelligence (AI), the…
Interview with a Robotics Engineer
Robotics technology has exploded in growth and applications over the past few decades. Once mostly relegated to factory assembly lines, robots now have infiltrated many…

Using Instagram to teach programming and coding
Social media platforms like Instagram have become a ubiquitous part of our lives. But did you know Instagram isn’t just for sharing selfies and viral…
The Arena of Innovation: Most Prestigious Robotics Competitions
In the realm of robotics, competitions are more than mere contests; they are a vibrant platform for innovation, teamwork, and problem-solving. Similar to the thrilling…